Новая версия ROS v7.4.0 вышла в свет.
Данная новость была опубликована 26 октября 2016г. На своем сайте EA5HVK - Weak signals Software (программа для приема слабых сигналов) объявил о выпуске новой версии интересной программы для приема в режиме слабого сигнала ROS HF
В новой версии программы был реализован новый код коррекции ошибок ROS, что улучшает декодирования на КВ диапазонах в том числе и на УКВ.
По данным опубликованным на сайте новый алгоритм начнет работу с 9 ноября в версии v7.4.0
сейчас можно скачать новую версию программы ROS v7.4.0 на сайте :
https://rosmodem.wordpress.com/
Кроме того на данном сайте можно познакомиться с информацией по дипломам выдаваемым при работе в моде ROS, а также ознакомиться с работой клуба любителей ROS связи и его дипломами. Имеется даже диплом за работу на СВ диапазоне 27 МГц.
Ранее я проводил несколько связей в моде ROS, а начинали мы проверкой проведением местной связи с Сашей UN3F, чтобы посмотреть что она из себя представляет. Сейчас не знаю, как активно работают станции в данной моде с нашей области, и работают ли вообще, об этом надо спросить у наших цифровиков UN7FU, UN7FBW, UN9FK, UN2FD и других. Но мода интересная и стоит попробовать поработать. Итак пробуем - ROS.
Пишем свои ощущения и опыт работы
А вот для информации про ROS
ROS - это режим передачи данных, предназначенный для обмена текстовой информацией радиолюбителями в реальном времени. Он представляет собой полудуплексный режим с неавтоматическим запросом повторов (non-ARQ - Automatic Repeat Request) и прямой коррекцией ошибок (FEC - Forward Error Correction). Этот режим передачи отлично зарекомендовал себя при проведении связей на очень большие расстояния, когда наблюдается периодическое затухание сигналов, а так же в условиях сильных помех.
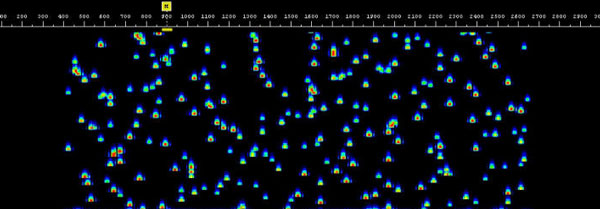
Формирование сигнала основано на модуляции MFSK (последовательная односигнальная FSK) и CPSK (непрерывная PSK) - пауза между сигналами отсутствует и нет никакой специальной формы сигнала. Сигнал ROS делится на отдельные кадры, которые образуются при помощи 144 тонов - 128 для данных (7-ми разрядный код Грэя) и 16 для синхронизации. 128-MFSK предоставляет очень высокую устойчивость против индустриальных и атмосферных помех, обладая при этом достаточно высокой разборчивостью. Однако, самая идеальная модуляция может не работать при условии плохой синхронизации даже в случае применения протокола коррекции ошибок. ROS позволила решить эту проблему путем применения альтернативного классической ФАПЧ (PLL) решению. Оно основано на применении 16 заранее определенных сигналов синхронизации. Во время испытаний ROS подтвердил свои способности синхронизации при наличии мощных помех, а так же в условиях глубоких замираний. Это позволяет 128FSK функционировать правильно, потому что всегда известно где начинается и где заканчивается каждый передаваемый символ. ROS поддерживает расстройку в 200 Гц. Однако основное достоинство ROS - это его способность синхронизироваться. Перед началом передачи полезной информации передатчик всегда выдает одну и ту же последовательность из 20 символов, предоставляя тем самым приемнику возможность для синхронизации. Приемник выполняет декодирование сигнала только в том случае, если правильно приняты как минимум 12 из 20 символов. Это видно на индикаторе, отображающем процесс захвата кадров. Для индикации конца передачи выдается другая последовательность из 16 символов - так приемник знает момент, когда нужно прекратить декодирование. В окне программы появляется отметка.
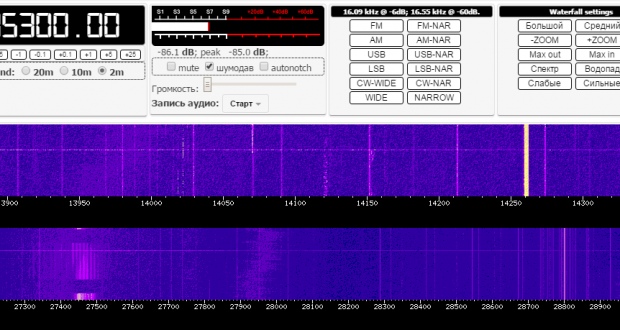
Ширина полосы у сигнала 2250гц
С остальной информацией можно познакомиться на сайте https://www.rdrclub.ru/mfsk/120-digital-mode-ros
73 и наслаждайтесь ROS
|  Главная
Главная